6ES7522-1BH10-0AA0
FB284�����f��
 ���������a��V90��ʹ�Å������K+���a�����}�_��ʽ����r���������K�����_�P�ӵ������������
���������a��V90��ʹ�Å������K+���a�����}�_��ʽ����r���������K�����_�P�ӵ������������
�����_�P�B�ӵ�һ��PLC�Ĕ�����ݔ���c��PLC�Ⱦ��̌����B�P��FB284���܉KConfigEPosݔ�����_��bit6��
��1����V90����P29240�O�Þ�1(�x�����K+���}�_��ʽ����);
��2���������_�P�B�ӵ�һ��PLC�Ĕ�����ݔ���c;
��3����PLC�Ⱦ��̣��������_�PDI�c�Ġ�B�P��FB284����ConfigEPosݔ�����_��bit6;
��4��FB284���܉K�x����ģʽModPos=4;
��5��ͨ�^ݔ�녢��OverV��OverAcc��OverDec�ٶȡ��Ӝp�ٶȵı���(*);
��6���ӵ��\������EnableAxis=1;
��7���\�Зl�� "CancelTransing" �� "IntermediateStop"����O�Þ� "1"��Jog1 �� Jog2 ����O�Þ� "0"��
ͨ�^ExecuteMode ���������|�l�����\�ӡ�������ɺ�"AxisRef"ݔ����1��
FB284���ӌ��F��λ����
? �\��ģʽ�x�� ModePos=2
? Jog1 ��Jog2 ����O�� "0"
? �S����ѻ���a���ѱ�У��
? CancelTransing=1��IntermediateS*��
? ConfigEpos=16#00000003
? �O��Ŀ��λ��Position���ٶ�Velocity������ Positive �� Negative ��횞� "0"
? ͨ�^ݔ�녢�� OverV��OverAcc��OverDec �ٶȡ��Ӝp�ٶȵı��ʣ�ͨ����ȡĬ�J�O�ü��ɣ�*����
? �ӵ��\������ EnableAxis=1
? ExecuteMode�������|�l��λ�\��
FB284���ӌ��F������λ����
? �\��ģʽ�x�� ModePos=1
? Jog1 ��Jog2 ����O�� "0"
? �S���Բ������У��ֵ���a��
? CancelTransing=1��IntermediateS*
? ConfigEpos=16#00000003
? �O�ö�λ�L��Position���ٶ�Velocity���\�ӷ�����Postion�o������ؓ�Q��
? ͨ�^ݔ�녢�� OverV��OverAcc��OverDec �ٶȡ��Ӝp�ٶȵı��ʣ�ͨ����ȡĬ�J�O�ü��ɣ�*����
? �ӵ��\������ EnableAxis=1
? ExecuteMode�������|�l��λ�\��
FB284���ӌ��F�B�m�\��ģʽ����
"�B�m�\��"ģʽ���S�S��λ�ÿ����������������һ���㶨���ٶ��\��
? �\��ģʽ�x�� ModePos=3
? Jog1 ��Jog2 ����O�� "0"
? �S���ػ���a��δ��У��
? CancelTransing=1��IntermediateS*
? ConfigEpos=16#00000003
? ͨ�^ݔ�녢�� Velocity �\���ٶȣ��\�з����� Positive �� Negative �Q��
? ͨ�^ݔ�녢�� OverV��OverAcc��OverDec �ٶȡ��Ӝp�ٶȵı��ʣ�ͨ����ȡĬ�J�O�ü��ɣ�*����
? �ӵ��\������ EnableAxis=1
? ExecuteMode ���������|�l��λ�\��
FB284���ӌ��F����K�\�п���
�˳���K�\��ģʽͨ�^�ӹ���"Traversing blocks"�팍�F�������S�Ԅӄ�������K���\�����n�K���O�ü���λݔ����
Ҫ��:
? �\��ģʽ�x��ModePos=6
? ConfigEpos=16#00000003
? �S�oֹ
? �S����ѻ����ֵ���a����У��
���E��
? ����ģʽ��Ŀ��λ�ü��ӑB푑�����V90 PN�ӵ��\�ЉK�������M���O�ã�ݔ�녢�� OverV��OverAcc��OverDec �ٶȡ��Ӝp�ٶȵı��ʣ�ͨ����ȡĬ�J�O�ü��ɣ�*����
? �\�Зl��"CancelTransing" �� "IntermediateStop"����O�Þ� "1"��Jog1 �� Jog2 ����O�Þ� "0"
? ����K̖��ݔ�녢�� "Position" ���O�ã�ȡֵ���� 0~ 16
? �\�ӵķ������c����ģʽ������K�е��O�ÛQ�����cPositive ��Negative�����o�P����회������O�Þ�"0"��
? �ӵ��\������AxisEnable=1
�x�����K̖��ͨ�^Execute Mode���������|�l�\�С�
FB284���ӌ��F�c��"Jog"����
�c���\��ģʽͨ�^�ӵ�"Jog"���܁팍�F��
Ҫ��:
? �\��ģʽ�x��ModePos=7
? ConfigEpos=16#00000003
? �S�oֹ
? �S���ػ����ֵ���a��У��
���E��
? �c���ٶ���V90 PN���O�ã��ٶȵ�OverV���������c���ٶ��O��ֵ�M�б��ʿs�ţ����hʹ��Ĭ�Jֵ*
? �\�Зl��"CancelTransing" �� "IntermediateStop"�c�c���\��ģʽ�o�P��Ĭ�J�O�Þ� "1"
? �ӵ��\������ AxisEnable=1
? �o��jog1��jog2��̖
��Ҏ
�Γ����ҕ�D�еġ���Ҏ���x헣��M�����Ѕ����O�ã�
���Ŀ��Ϣ�������Ծ����Q������עጵ���Ϣ��
��Ŀ���Ϣ�����鿴CPU ��ӆ؛̖���M�B�Ĺ̼��汾������������
�����R�c�S�o�������ژ��R�O������Q��λ�õ���Ϣ�� ����ʹ�� ��Get_IM_Data��ָ ���xȡ��Ϣ�M���R�e��
��У�͡����ھ��g�^���У�ϵ�y��ͨ�^*��У�́��Ԅ��R�e PLC ������ԓУ�ͣ��ɿ����R�e�Ñ������Д��ɂ� PLC �����Ƿ���ͬ��ͨ�^ָ�GetChecksum�������xȡУ�ͣ���D 1 ��ʾ��

�D1 ���R�c�S�o����
PROFINET �ӿ�
�Γ���PROFINET�ӿ�[X1]�����������
�����
����Ҏ�������RPROFINET�ӿڵ����Q�����ߺ�ע�
����̫�W��ַ������D 2 ��ʾ��

�D2 ������̫�W��ַ
�١��ӿ��B�ӵ��������ԏ������ˆ����x�ӿ��B�ӵ����ӾW��Ҳ���������µľW�j��
�ڡ�IP �f�h����Ĭ�J�顰���Ŀ���O��IP ��ַ�����˕r���Ŀ�M�B���O��IP��ַ���ӾW�ڴa�ȡ����ʹ��·�������t���ʹ��·�����������O��·������ַ��Ҳ�����x�����O����ֱ���O�� IP ��ַ�����t�����ڳ�����ʹ��ָ�T_CONFIG������IP ��ַ��
�ۡ�PROFINET����
������O����ֱ���O��PROFINET �O�����Q���t��ʾ����Ӳ���M�B�нM�B�O�����Q�������ڳ�����ʹ��ָ��T_CONFIG���O���O������
����Ԅ�����PROFINET �O�����Q��,TIA ��;�����ӿ����Q�Ԅ�����PROFINET�O�����Q��
���D�Q�����Q������ָ��PROFINET �O�����Q�D�Q����� DNS �T�������Q���Ñ������ġ�
���O�侎̖������ָ PROFINET IO �O��ľ�̖���ڰl�����ϕr����ͨ�^�����xȡԓ��̖������IO ������Ĭ�J��0�� �o���ġ�
���r�gͬ������
���Լ��ͨ�^NTP ����������ͬ���r�g����NTP��Network Time Protocol�� ���W�j�r�g�f�h��������ͬ���W�j��ϵ�y�r犵�һ�Nͨ�ÙC�ơ����Ԍ��F���ӾW�ĕr�gͬ�������Ȅtȡ�Q����ʹ�õ�NTP �������;W�j·�������ԡ���NTP �r�gͬ��ģʽ�£�CPU �Ľӿڰ��O���ġ������g�����r�g����λ���룩�� NTP ���������r�@ȡ�r�ͬ�����r�g�g����ȡֵ������10�뵽һ��֮�g, �@����������4��NTP��������
��CPU�cԓ�O���е�ģ�K�M�Д���ͬ��������ָͬ�� CM/CP �ĕr�g��CPU �ĕr�g��
 ע�⣺
ע�⣺
���h��CM/CP��CPU�У�ֻ��һ��ģ�K�M�Еr�gͬ�����Ա�ʹվ�ȵĕr�g����*��
������ģʽ����
�����O�á�IO ������������ ��IO�O�䡱�����ԓ CPU ���������O�䣬�t���IO�O�䡱�����ڡ��ѷ���� IO �������С��� �x��ԓIO �O���IO ����������� IO ����������ͬһ�Ŀ�У��t�x��δ���䡱������������Ҫ�x���ǷPN �ӿڵą�������λ IO �������M�з��䡱�͡����Ȇ��á��ȅ������Լ��O�������O���ͨ�ł�ݔ�^�ȡ�
���x헣����Ԍ����ӿ��x헡��������|���ࡱ�������r�O�����͡��˿ڡ��M���O�á�
��Web �������L������
�������ʹ��ԓ�ӿ��L�� Web �����������t����ͨ�^ԓ�ӿ��L�������� CPU �Ȳ��� Web ��������
��Ӳ�����R�������ӿڵ��\���ַ
������ݔ��ݔ��
����Ҏ�����Γ�������ݔ��/ݔ���ġ���Ҏ���x헿���ݔ���Ŀ��Ϣ��
-
�����Q�������x���ĽM�������Q
-
��עጡ����f��ģ�K���O�����;
��������ݔ�롱����ͨ��0 �ĽM�B�����M���f������D 3 ��ʾ��

ͨ�^���c�ӿ� (MPI) ���F����ͨ��
ע��ʹ��FB283����V90�r�����܉Kݔ�����_AXIS_NO����O�Þ�2��
 �����O�Þ�Cе�Y�����p�ٱȡ�ģ�B�S��ģ�B������ô�O�ã�
�����O�Þ�Cе�Y�����p�ٱȡ�ģ�B�S��ģ�B������ô�O�ã�
��Ҫʹ��V-Assistantܛ�����ڡ��O�Å������еġ��O�ÙCе�Y�����������M���O�á�
EPOS ���Ԍ��Fλ��ͬ�����Ɔ���
�����ԣ�ֻ�nj��F���S�Ķ�λ���ƣ�ͬ��������Ҫ1500(T)+V90 PN�M�B��ˇ����
FB284��Ό�ConfigEpos���_�M�����ã�
FB284��ConfigEPosݔ�����_�����¿���λ�cV90���P��
BIT0��OFF2����ͣ܇(1=�]�н�ֹ�}�_)��
BIT1��OFF3�o��ͣ܇(1=�]�н�ֹ�}�_)��
BIT2��ܛ��λ��1=����ܛ��λ���ܣ���
BIT3��Ӳ��λ��1=����Ӳ��λ���ܣ���
BIT6���ⲿ��λ�_�P��̖Դ��
BIT7��������=�ⲿ����θ��ģ�
BIT8�����m��ݔMDI�O��ֵ��1=�����
Ҫʹ���S������Ҫ��ConfigEPos��BIT0��BIT1���֞�1����ͨ�^�˷�ʽ��ݔӲ����λʹ�ܡ������_�P��̖�ȽoV90������λ�������蹦���O�á�
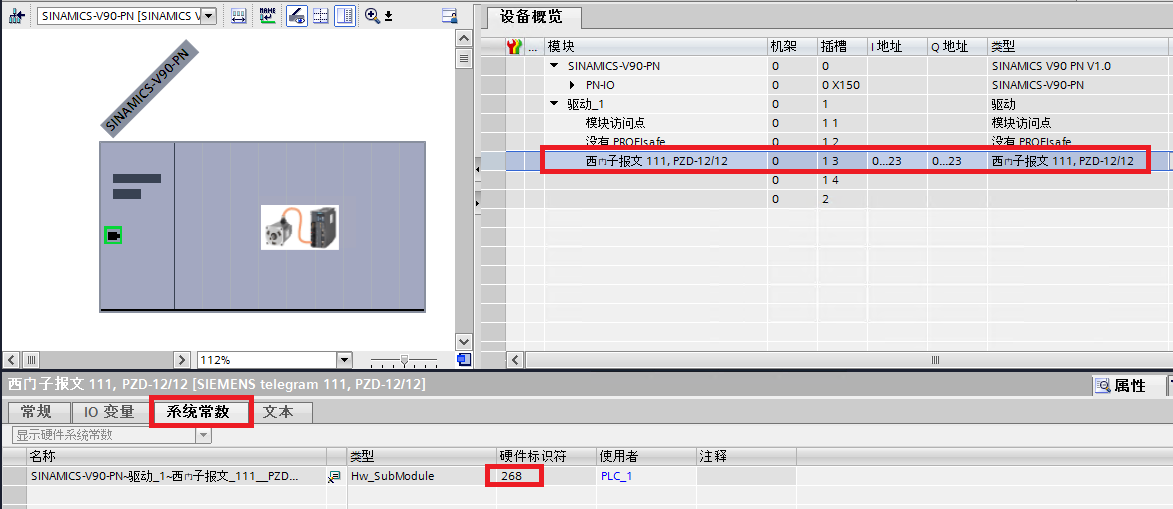
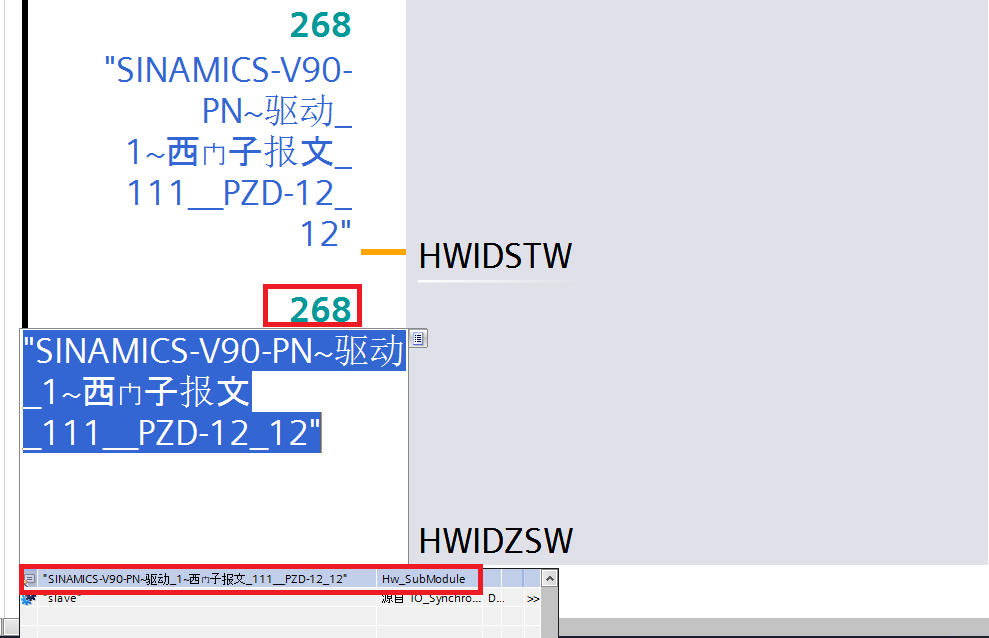
FB284��HWIDSTW/HWIDZSW���
�@��̎ݔ����_ͨ�^�鿴111ͨӍ����Ӳ�����R��������ݔ����_�����ˆ����x�����õ�111���ā��_����
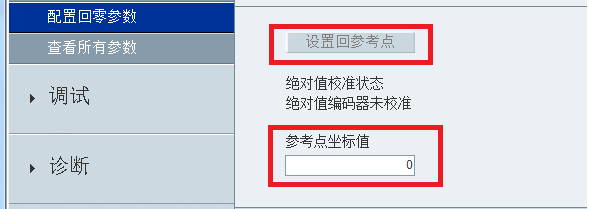
ֵ���a����λ��㣿
EPOS��ֵ���a��У��(3�N��ʽ)��
(1). ͨ�^V-ASSISTANTܛ���O��
-
�O��늙C��ǰλ�Ì����ą����cλ������ֵ��Ĭ�J��0
-
�c���O�û����c���o
-
���б��慢����ROM


 �ھ���ԃ
�ھ���ԃ 



